物聯網(IoT)作為通信行業的重要發展方向,正經歷從萬物互聯到萬物智聯的深刻變革,其中AIoT(人工智能物聯網)芯片與網絡信息安全軟件開發成為支撐產業升級與保障生態安全的兩大核心賽道。本報告旨在深度解析AIoT芯片的投資邏輯與市場格局,并探討在物聯網環境下網絡與信息安全軟件開發的挑戰與機遇。
一、 AIoT芯片:智能物聯的核心引擎
- 賽道定義與市場驅動:AIoT芯片集成了感知、計算、連接與AI處理能力,是實現設備智能化的硬件基礎。其增長主要由以下因素驅動:智能家居、工業互聯網、車聯網等應用場景的爆發式需求;邊緣計算的興起降低了對云端算力的依賴;以及半導體工藝進步與異構集成技術的成熟,使得在功耗、成本與性能間取得平衡成為可能。
- 投資邏輯解析:
- 技術壁壘與先發優勢:關注在低功耗設計、專用AI加速器(如NPU)、多模連接(如5G、Wi-Fi 6、藍牙)以及工藝整合方面具備核心技術的企業。
- 應用場景滲透率:投資應聚焦于高增長垂直領域,如智能汽車(自動駕駛芯片)、智能安防(視覺處理芯片)、可穿戴設備(健康監測芯片)等。
- 產業鏈協同能力:具備從芯片設計到軟硬件解決方案全棧能力,或與終端應用巨頭形成生態綁定的公司更具長期價值。
- 競爭格局與趨勢:市場呈現多元化競爭態勢,既有傳統半導體巨頭(如高通、英偉達)向邊緣側延伸,也有專注于垂直領域的初創公司崛起。定制化(Chiplet技術)、安全可信(內置安全模塊)以及軟件定義硬件將成為重要趨勢。
二、 網絡與信息安全軟件開發:物聯網生態的護航者
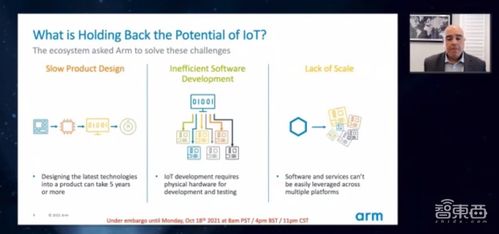
- 物聯網環境下的安全新挑戰:設備海量且異構、網絡邊界模糊、數據實時性強等特點,使得傳統安全防護手段面臨巨大挑戰。主要風險點包括設備固件漏洞、通信協議攻擊、數據泄露與隱私侵犯以及基于AI的自動化攻擊。
- 軟件開發的關鍵方向:
- 終端安全:開發輕量級的安全代理、可信執行環境(TEE)及固件安全更新機制,保障設備自身安全啟動與運行。
- 通信安全:強化物聯網協議(如MQTT、CoAP)的加密與認證,并利用軟件定義邊界(SDP)等技術實現動態訪問控制。
- 平臺與數據安全:構建具備威脅檢測與響應能力的物聯網安全運營平臺(物聯網SOC),并集成數據加密、脫敏及隱私計算技術。
- 安全開發生命周期(SDL):將安全要求嵌入物聯網應用與服務的全開發流程,實現“安全左移”。
- 市場機遇與投資視角:隨著法規完善(如等保2.0、GDPR)及行業對安全重視度提升,物聯網安全軟件市場處于高速增長期。投資者應關注:
- 提供一體化平臺解決方案的廠商;
- 在特定領域(如工業控制安全、車聯網安全)有深厚積累的專精特新企業;
- 將AI/機器學習用于異常檢測與自動化響應的創新公司。
三、 協同發展:芯片與安全的融合共生
AIoT芯片與安全軟件的協同創新正成為關鍵。一方面,芯片級安全硬件(如安全 enclave、PUF)為軟件安全提供了可信根;另一方面,安全軟件能夠管理和調度芯片的安全功能,形成縱深防御體系。投資布局需關注兩者結合的解決方案,例如內置AI加速與安全模塊的SoC,配合端到端的安全管理軟件,共同構筑智能、高效且可靠的物聯網基礎設施。
結論:在物聯網向AIoT演進的大潮中,芯片是“智能”的載體,安全是“可信”的基石。投資者需以系統化視角,甄別在AIoT芯片設計上具備核心技術突破能力,同時在軟件層面能構建主動、彈性安全防護體系的企業。兩者的深度融合與迭代發展,將是決定未來物聯網產業競爭格局的核心要素,也孕育著巨大的投資價值。